
什么是梯形加减速?步进电机操控算法—梯形加减速运动算法
完成物体X的移动,体系要求物体X从A点动身,到B点中止,移动的时刻越短越好且体系安稳。
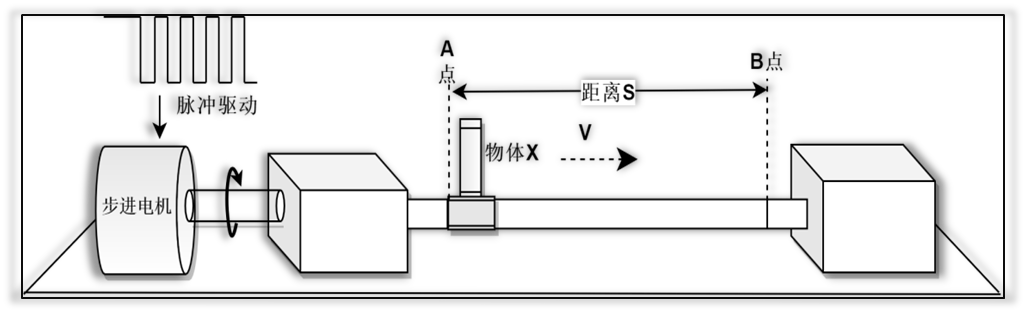
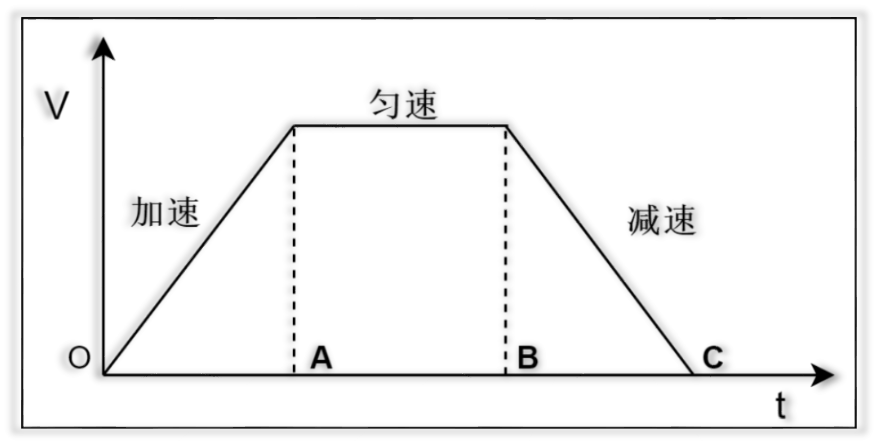
OA段为滑块的加快部分、AB则是匀速部分,BC则是减速部分。因其图画出现梯形,所以咱们把这种运动改变称之为梯形加减速
为什么要运用加减速呢?步进电机有一个很重要的技术参数:空载发动频率,也便是在没有负载的状况下可以正常发动的最大脉冲频率,假如脉冲频率大于该值,步进电机则不可以正常发动,发生丢步或许堵转的状况;或许也可以理解为因为步进脉冲改变过快,转子因为惯性的效果跟不上电信号的改变。所以要运用加减速来处理发动频率低的问题,在发动时运用较低的脉冲频率,然后逐步的加快频率。
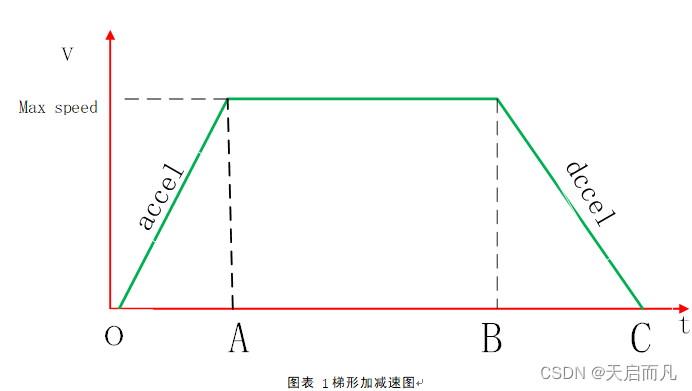
梯形加减速总共分为三个阶段,OA 加快部分、AB 匀速部分 和 BC 减速部分。在 OA 加快进程中,由低于步进电机的发动频率开端发动(模型中由 0 发动),以固定的加快度添加快度到目标值;在 AB 匀速进程中,以最大速度匀速运动;在 BC 减速部分中,以加快度不变的速度递减到 0;这种算法是一种在加快进程和减速进程中加快度不变的匀变速操控算法,因为速度改变的曲线有折点,所以在发动、中止、匀速段中很简单发生冲击和振荡。
关于步进电机加减速阶段来说,因为现已设定好了步进电机加快度、减速度、最大速度和总运转步数,所以说总共分为2种状况:
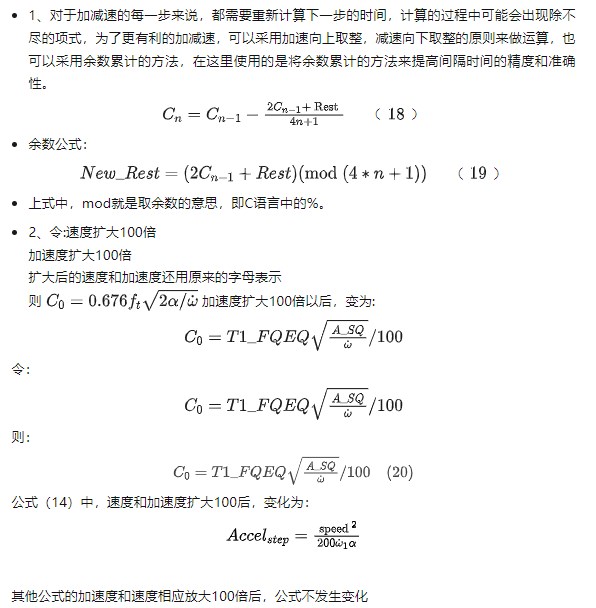
算法优化 因为算法在核算进程中涉及到一些浮点型运算,很多的浮点型运算会使得功率大幅度的下降,为了使得核算速度得到更优异的优化,咱们做如下优化:
声明:本文内容及配图由入驻作者编撰或许入驻协作网站授权转载。文章观念仅代表作者自己,不代表电子发烧友网态度。文章及其配图仅供工程师学习之用,如有内容侵权或许其他违规问题,请联络本站处理。告发投诉

健;2、要求显现运作时的状况,并设置一个极限值,当速度超越极限时宣布报警信号。急!!!!!!!!!!!!
有一个很重要的技术参数:空载发动频率,也便是在没有负载的状况下可以正常发动的最大 脉冲频率,假如脉冲频率大于该值,
的进程,把整一个完好的进程中速度随时刻改变联络画出来,便是速度曲线。 “S”形
,遇到了不少问题,在这里记载一下,希望能帮到未来对此有困惑的自己,假如能帮到其他人也算是有幸。
进行了深化的研讨, 给出了加加快度、加快度、速度、位移的核算通式, 并对各种状况做了评论, 经过一个核算实例标明, 本文所
之间的联络。然后在剖析 S 曲线传统的七段模型后,提出了根据 S 曲线
是数控体系的关键技术,对进步数控体系的精度及速度有重要的含义。提出了一种
...